<능동 전자식 조향 레이더의 발전과 기술동향>
세종대학교 국방시스템공학과 김은희
1. 서 론
레이더(RADAR)는 RAdio Detection And Ranging 의 약자로 RF 전파신호를 이용하여 표적을 탐지하고 위치를 측정하는 센서로 현재는 이름 그대로 명사화 되어 사용될 만큼 오랜 역사를 가지고 있다. 레이더는 비교적 탐지거리가 길고 주야간 사용이 가능하며 기상의 영향이 적은 장점을 가지고 있다. 주로 무기체계에서 장거리 표적탐지를 위해 사용되어 왔으나 최근 그 응용 분야가 다양화 되고 있으며 대표적 자율주행 차량의 기본센서로 자리 잡고 있다.
국내 무기체계 분야에서는 한국형 전투기에 장착되기 위한 능동 전자 조향식 레이더(AESA, Active Electronically Scanned Antenna), 차기호위함에 장착될 다기능 디지털 레이더(Multifunction Digital Radar)등 최신 기술의 레이더가 개발 진행되고 있으며, 관련 하드웨어 및 다양한 소프트웨어 기술이 활발히 연구 개발되고 있다. 이에 따라 본 글은 능동전자조향 다기능 레이더 기술 동향과 발전 추세를 소개하고자 한다.
2. 능동 전자식 조향 레이더의 발전
최근 레이더의 발전은 능동 전자식 조향 안테나(Active Electronically Scanned Antenna) 기술에 의해 이루어지고 있다고 해도 과언이 아니다. 전자식 조향 안테나는 안테나를 구성하는 각 배열의 위상을 변경하여 빔을 조향하는 방식을 지칭하는 것으로 위상배열안테나라고 불리기도 한다. 모터 회전에 의한 기계식 안테나에서 빔의 조향이 관성등 물리적인 한계를 가지는데 비해 이러한 전자식 조향은 빔 조향에 있어서 시간적 지연이 거의 없어서 다수의 작업들을 거의 동시에 수행할 수 있다.
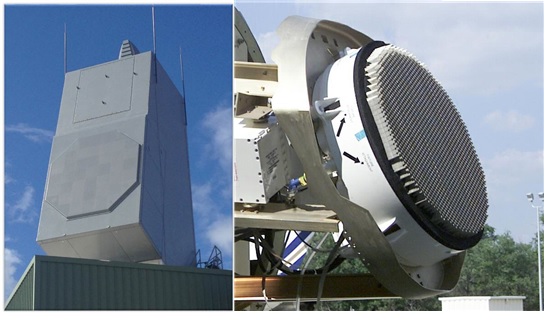
‘능동(Active)’은 전자부품에서 일반적으로 일컬어지듯이 각 배열 소자가 자기 전력 또는 증폭기를 가지는 것을 의미하는 것으로, 독립적인 반도체 송수신 모듈(TR module : Transmit/Receive Module)을 가지는 것을 의미한다. 능동 전자식조향 레이더는 그 자체(하드웨어적)로도 상당한 성능의 향상을 가져오며, 운용상의 유연성을 제공함에 의해 소프트웨어적 성능 향상의 가능성을 매우 높이고 있다. 그림 1은 기계식 레이더, 수동 위상배열 레이더 및 능동 위상배열레이더로의 발전을 보여준다.
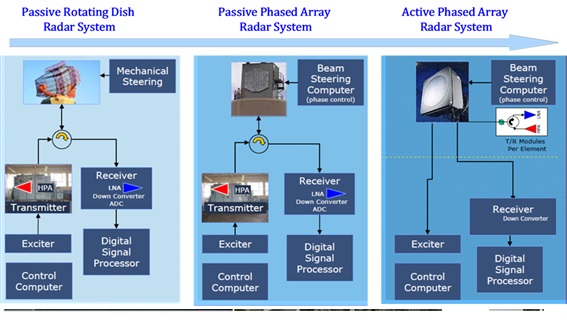
<그림 1> 레이더 시스템의 발전
HPA는 High Power Amplifier의 약어로 송신신호의 출력을 증폭하기 위한 증폭기이며, LNA는 Low Noise Amplifiers의 약어로 수신신호를 증폭하는 증폭기로 입력 신호의 품질(Signal to Noise Ratio)을 결정하는 초단의 부품이다.
배열소자별로 독립적인 송수신 모듈을 가진다는 것은 일반적으로 기계식 안테나 또는 수동 위상배열 안테나가 고출력 진공관 증폭기에 의한 송신기와 단일 수신증폭기(LNA: Low Noise Amplifier)로 운용되는 것과 대치된다. 이러한 송수신 모듈은 배열소자에 근접 배치되므로 파워의 손실이 매우 적어지며, 이는 탐지거리의 향상을 가져온다. 이러한 손실 저하와 파워 향상만으로도 최대 탐지거리가 50%이상 향상되는 경우도 있다. 뿐만 아니라, 분산되어 있는 송수신 모듈 중 일부가 고장을 일으킬 때에도 레이더 전체시스템이 운용될 수 있어서 하드웨어의 성능저하가 점진적(graceful degradation)으로 진행될 수 있으며, 이는 평균 동작 시간 (MTBF : Mean Time Between Failure) 등의 시스템의 신뢰성을 크게 향상 시킬 수 있다.
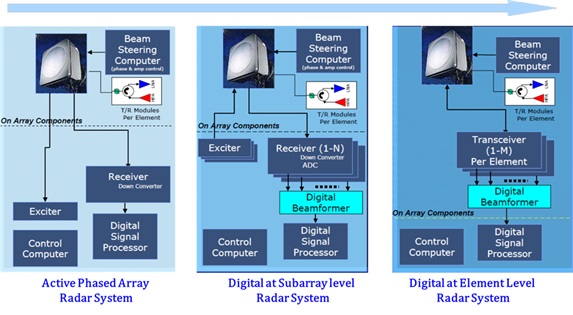
<그림 2> 능동 위상배열 레이더와 디지털 레이더
디지털 레이더는 레이더의 수신부 중 디지털 변환 부분이 배열소자별로 분리된 형태를 정의하는 것으로, 디지털 방식의 빔포밍이 가능하다. 일반적으로 군용 레이더는 최소 수백 또는 수천 개의 배열소자로 구성되므로 전체 배열 모두를 디지털 변환하는 것은 상당한 양의 데이터 연동 및 디지털 연산 처리능력을 요구하며 비용을 상승시키므로 그림 2의 가운데 방식과 같이 일부 배열들(부배열: Subarray)을 합쳐서 변환하는 방식을 취하는데, 최근 국내 개발된 차기 국지방공레이더나 차기 대포병 레이더 등이 이러한 형태로 개발되었다. 이들을 구분하기 위해 전체 배열을 모두 디지털 변환하는 경우는 특별히 완전 디지털 레이더(Full Digital Radar)라고 지칭하기도 한다.
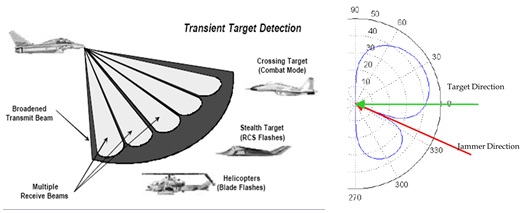
디지털 레이더의 가장 큰 장점 중 하나는 디지털 빔포밍으로 이 방식을 이용하면 다양한 형태의 빔을 형성할 수 있다. 대표적으로 재머(Jammer)와 같은 전자전 공격이 있을 때 대상 방향으로 널(Null)을 형성하여 대전자전 능력을 향상시킬 수 있는 적응빔을 형성할 수 있으며, 여러 방향으로 빔을 동시에 형성하는 다중빔 및 시공간 적응빔(STAP: Space Time Adaptive Processing)등도 완전히 가능하다. 그림 3은 빔의 형태 즉 방향에 따른 안테나의 이득을 나타낸 것으로 왼쪽의 그림은 다중빔이 형성된 것을 나타내며, 오른쪽 드림은 재머가 있는 방향으로는 안테나의 이득을 최소화 하여 재밍 신호가 들어오지 못하게 빔을 널링(Nulling)하는 것을 나타낸다.
완전 디지털 레이더(Full Digital Radar)는 소프트웨어 변경만으로 시스템의 구조 변경 및 성능향상이 가능하므로, 소프트웨어에 의한 업그레이드가 가능하고 정해지지 않은 개발 방향에 대해서도 아키텍처와 구현된 HW를 계속해서 재사용 할 수 있는 커다란 장점을 가지고 있다. 그러나, 시스템의 복잡성 증가, 필요한 디지털 연산 능력의 증가, 비용의 상승 및 소형화된 수신기의 필요와 같은 문제들을 해결하여야 하며 이를 위한 다수의 연구들이 활발히 진행 중이다.
<그림 3> 다중빔(좌)와 적응빔(우) 형성
3. 다기능 레이더와 자원관리 기술
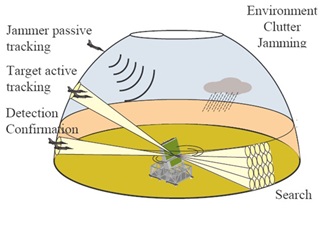
앞서 언급한 것 같이 실제 능동위상배열 레이더의 가장 큰 장점은 빔조향에 소요되는 기계적 관성이 없어서 기민(Agile)한 빔의 조향이 가능하다는 점이다. 이것은 하나의 레이더가 다수의 기능이 수행할 수 있도록 한다. 과거, 탐색 레이더와 추적 레이더가 분리되어 있었던 것과는 달리 다기능 레이더는 원하는 공간에 대한 탐색 기능(상황인식), 추적 기능 및 미사일 유도기능을 모두 수행할 수 있게 되었다(그림 4). 또한 기존의 추적 레이더가 하나 또는 2개 정도의 표적을 추적할 수 있었던 것에 비해 다수의 표적을 동시에 추적할 수 있으며, 각각의 표적을 탐지하는 주기 또한 독립적으로 조정할 수 있다. 탐색에 있어 지정된 공간을 무작위 순으로 균일하지 않게 탐색할 수 있으며, 낮은 감도의 탐지를 통해 1차적인 탐지 후, 되돌아와 감 Alert-Confirm 기법이라고도 불림
도를 올려 탐지하는 2 단계 방식의 탐지도 가능해 진다.
탐색방법이 다양해지는 것은 또한 탐지 목적에 따른 성능에 큰 영향을 미친다. 탄도탄의 초기단계(Boost) 탐지/추적을 위해서는 그림 5의 (우)와 같이 펜스형태의 탐색을 통해 효율성을 높인다. 이렇게 하는 것은 에너지를 집중하여 장거리 탐색이 가능하면서도 탐색주기를 늘이지 않을 수 있다. 동일한 탄도탄 탐지/추적을 목적으로 하더라도 종말방어를 위한 탐지는 (좌)와 같이 이루어지며, 탐지거리가 줄어들지만 고각방향으로 탐색영역을 늘이는 방식으로 이루어져야 한다. 다기능 레이더의 경우 이러한 탐색 다양한 패턴의 운용이 소프트웨어에 의해 가능하다.
<그림 4> 다기능 레이더의 빔운용
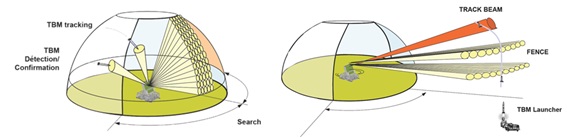
<그림 5> 탄도탄 탐지/추적을 위한 다기능레이더의 탐색패턴: 종말단계(좌), 초기단계(우)
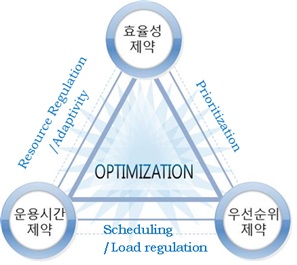
이러한 유연성의 증가로 인해 등장한 것이 레이더 자원관리(Resource Management) 분야이다. 레이더 자원관리는 자원의 최적화 문제이다. 현재 다기능의 수행은 일반적으로 하나의 레이더 하드웨어가 시간을 분할(Time Sharing)하는 방식으로 이루어진다. 즉, 레이더 자원관리는 수행해야 하는 일(Task) –지정된 공간 탐색을 통한 새로운 표적의 탐지, 다중표적에 대한 추적유지, 미사일유도 등– 들이 어떠한 우선순위로 어떤 비율로 시간을 나누어 쓰는 것이 레이더의 전체 성능이 극대화할 수 있는가를 결정하는 것이다. 이에 관하여 2008년 IEEE Radar conference에서는 아래 그림 6과 같이 3가지의 제약조건을 설명하였다[참고문헌 5].
첫 번째는 레이더 시스템의 최상위 효율성 또는 효과도(Measure of Effectiveness) 제약이다. 이는 다소 장기적인 측면에서의 기능별 우선순위, 추적 가능한 최대 표적의 수, 추적 주기 및 추적수행시간 등을 결정하는 기준이 되는 제약이다. 만약 특정 공간에 대한 감시와 위협표적 추적을 동시에 수행하는 레이더에서, 위협표적의 수가 늘어나는 경우, 공간 감시를 포기해야 하는가? (혹은 일정시간을 포기하지만 다시 복귀하여야 하는가?), 일부 표적에 대한 추적을 포기하여야 하는가? (포기한다면 어떤 표적을 포기하는 것이 좋은가?) 또는 추적 주기를 조금씩 늘여서 해결할 수 있는가? 등의 결정을 요구하는 것이다. 추적의 품질과 추적 주기에 관한 연구들이 표적의 모델 (등속, 등가속 등) 및 추적 필터(칼만 필터 등)와 관련하여 제안되었으며, 대표적으로는 van Keuk 의 관계식 등이 있다[참고문헌 6].
<그림 6> 레이더 자원관리와 제약 사항
두 번째는 우선 순위제약이다. 첫 번째 제약에서 우선순위와 다소 겹치는 부분이 있을 수 있으나, 이때의 우선순위는 다소 단기적인 관점이다. 즉, 주어진 일을 모두 수행할 수 있는 시간자원이 있으나, 어떤 일은 지연되어 수행되어야 할 때의 우선순위를 결정하는 것이다. 일반적으로 우선순위는 정적인 부분과 동적인 부분으로 나누어진다. 정적 우선순위는 단기적으로는 변하지 않고 정해져 있는 우선순위로 예로는 탐색보다 추적이 우선하며, 추적보다 미사일유도가 우선하는 것 등이 있다. 동적 우선순위는 추적해야 하는 표적의 우선순위를 결정하는 것으로 표적의 거리, 속도, 고도 등에 따라 정하며, 연구 분야로는 위협도 분석, 정해진 규칙에 의한(Rule based) 우선순위 선정기법, 퍼지(Fuzzy) 이론, 신경망(Neural net)이론 등의 지식 기반(Knowledge Based) 기법 등이 있다[참고문헌 7].
마지막 세번째는 운용시간의 제약으로 제한된 시간 내에 더 중요한 일(task)을 최대한 많이 수행하고자 하는 것이며, 실제적인 스케줄링이다. 만약 동일한 시간에 우선순위가 높은 표적 1개와 조금 덜 위협적인 또는 우선순위가 조금 낮은 표적 2개에 대한 추적 수행이 있을 때, 동일한 할 수 있다면, 어떤 쪽을 수행하여야 할까? 물론 이 질문에 대하여 무기체계 레이더는 위협적인 표적 1개라고 답하는 것이 일반적이지만, 우선순위의 정도 등의 상황에 따라서는 결정의 문제가 되어질 수 있다. 또, 우선순위가 낮지만 정해진 시간 내에 수행하지 않는다면, 전혀 수행할 수 없는 일이 있다면 어떨 것인가? 이러한 예로는, 방위각 방향으로 회전하는 다기능 레이더에서 특정 방위각 내의 표적을 추적하는 경우에 나타날 수 있다. 왜냐하면 해당 각도를 회전한 후에는 다음 회전 때까지 절대로 수행할 수 없기 때문이다. 이와 관련된 알고리즘은 주로 컴퓨터 운용 시스템에서 사용되는 태스크 스케줄링 기법들이다. 대표적인 기법으로는 데드라인이 가장 가까운 태스크를 먼저 수행하는 EDF(Earliest Deadline First)기법, 수행 시간을 고려하였을 때 데드라인까지 가장 여유가 없는 태스크를 먼저 수행하는 LLF(Least Laxity First)기법, 최소 수행시간을 가지는 태스크를 먼저 처리하는 SPTF(Shortest Processing Time first) 기법 등이 있다.
<그림 7> 레이더 자원관리자 구조 (프랑스 Thales 사)
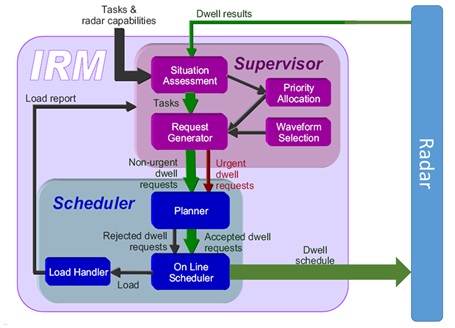
이러한 레이더 자원관리를 통합적으로 이루어내기 위하여 프랑스 Thales사에서는 그림 7와 같은 구조를 제안하였다. 이 구조는 크게는 상위관리자(Supervisor)와 스케줄러(scheduler)로 구성되며 상위 관리자는 현재 탐색된 상황에 따라 해야 할 일들(Task)을 생성하는 상황인식기(Situation Assessment)와 실제 빔조향 요청을 생성하는 요구 생성기(Request Generator)로 구성되어 있다. 상황인식기(Sinuation Assessment)에서는 탐지 상황과 탐색/확인/추적 단계 전환 전략 및 현재 추적 상황을 인식하여 해야 할 일(Task)을 생성하며, 추적 트랙들 간의 우선순위 결정과 추적 파라미터(주기 등)를 설정한다. 요구생성기(Request Generator)는 전달된 태스크와 우선순위, 파형을 부하밸런스를 고려하여 빔조향 요구를 생성하고 요청한다. 빔조향 정보는 빔 방향, 파형, 우선순위, Deadline 으로 구성된다.
자원관리 어떻게 이루어지느냐에 따라 다기능 레이더 시스템의 전체 효과도는 크게 달라질 수 있으며, 이는 운용 소프트웨어에 의해 좌우될 것이다. 따라서 레이더 자원관리 내 각각의 알고리즘 개발 뿐 아니라 소프트웨어의 신뢰성 확보는 다기능 능동위상배열 레이더 시스템이 당면한 가장 중요한 과제일 것이다.
4. 미래 발전 추세
최근 레이다 분야의 연구는 디지털레이더의 상용화를 위한 하드웨어 경량화, 비용절감, 대용량 데이터의 전송 및 고속 연산 처리기술과 앞선 설명된 자원관리 기술을 포함, 디지털 레이더의 성능을 최적화하기 위한 소프트웨어 알고리즘의 개발, 그리고 통합적 RF 시스템의 개발(Integrated RF system)등으로 볼 수 있다.
RF 하드웨어 기술은 저비용으로 효율이 높고 대역폭이 넓은 반도체 시스템을 개발하는 것이다, 최근 거의 상용화를 이루었다고 할 수 있는(주파수 대역에 따라 다름) GaN(Gallium Nitride) 파워 앰프의 경우, 그간 사용되어 오던 GaAs(Gallium arsenide)에 배히 출력 파워의 밀도가 최대 10배에 이르기 때문에 경량화와 소형화 그리고 저비용을 달성할 수 있다. 또한 효율이 높고 발열량이 상대적으로 낮아서 열효율이 매우 좋으며 수신단의 Breakdown voltage가 10배 이상 높기 때문에 수신기의 성능을 비약적으로 향상시키고 있다. 저비용을 달성하기 위해 제안되는 또하나의 방법은 구성품의 공용화와 개방형 구조의 채택으로, 하드웨어 플랫폼을 레이더, 데이터통신 및 전자전 장비에 공통적으로 사용할 수 있도록 개발하고 소프트웨어적 변경(Software Defined)만으로 응용분야에 맞게 사용가능하도록 함으로써 생산규모를 확대하는 방식이다.
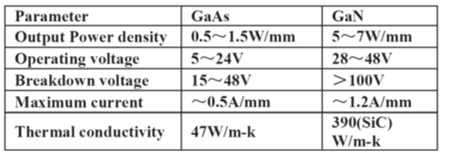
<표 1> GaAs 와 GaN 의 성능 비교
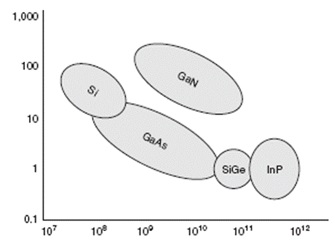
<그림 8> RF반도체와 주파수(Hz)별 파워(W)
신호처리 등 디지털 처리에 사용되는 하드웨어로서의 DSP(Digital Signal processing)는 고속 클록(667MHz ->3.0GHz)과 다중 코어를 이용한 병렬 처리 구조로 발전하고 있어서, 연산량이 대폭 증가하고 있다. (40GFLOPS → 64GFLOPS → 600 GFLOPS) 최근 머큐리 시스템에서는 1.8 GHz 이상의 고속 클록과 다중코어(12코어 이상)의 병렬 처리 구조을 사용하고 보드 내에 2개의 DSP를 사용하여 단일 보드 내 최대 1.38 Tera FLOPS (FLoating Operation Per Sec)의 연산 속도 달성하고 있다. 뿐만 아니라, 최근 GPU(Grapics Processing Unit)나 고속 FPGA(Field Programmable Gate Array)이용한 연산의 병렬화를 추구하고 있다.
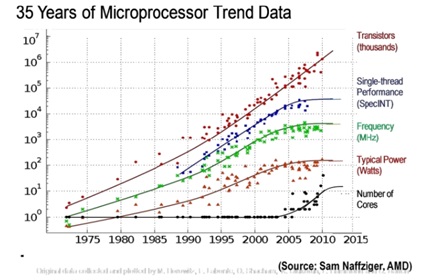
<그림 9> DSP의 성능의 발전(트랜지스터의 고집적화, 클록의 고속화, 멀티코어로 발전)
기존의 레이더 성능이 하드웨어에 대부분 의존적이었던 것과는 달리, 디지털 레이더는 앞서 설명한 자원 관리, 빔형성 및 운용 방식 등 소프트웨어 알고리즘에 대한 의존성이 높다. 게다가 은닉성(stealth)의 증가, 고속화(high speed) 및 고기동(high maneuvering) 화 등 위협 표적이 진화 되고, 클러터 및 방해 전파 등에 의해 환경이 복잡해짐에 따라 이를 인식하고 대응하는 소프트웨어에 기반한 지능형 레이더 –Cognitive Radar, Adaptive Radar, Intelligent Radar 등– 기술 들이 연구되고 있으며, 다수의 레이더가 상호 협력적으로 운용되는 MIMO(Multi Input Multi Output) 레이더와 관련 기술에 대한 연구도 활발히 진행되고 있다.
마지막으로 다기능(multi function)을 확장하여 다중 임무(mission)를 수행하는 통합 RF시스템에 대한 연구가 진행되고 있다. 이는 단일 광대역 안테나를 이용하여 다중 임무를 행하는 것으로 시간을 분할방식이 아니라 안테나를 분할(sub- aperture)하는 방식을 택하는 것이다. 항공기의 경우, RF를 이용하는 다수의 장비들 – 레이다, 전자전, 통신 – 을 장착하는데, 이를 단일 공통 안테나로 수행함으로써 자기 은닉성(stealth)을 증가시키고, 파워, 크기, 무게 및 비용을 감소시키고자 하는 것이다. 더 나아가 안테나의 형상을 기존의 파라볼릭 이나 평면 안테나가 아닌 플랫폼의 형상에 맞추는 형상적응 안테나(Conformal antenna) 에 대한 연구도 진행되고 있다.
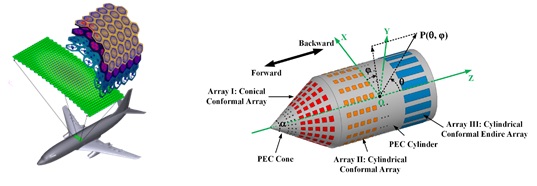
<그림 10> Conformal Antenna
5. 요약 및 맺음말
능동 전자식 조향 (AESA)레이더, 더 나아가 완전 디지털 레이더는 기계적 레이더에 비해 레이더의 성능을 비약적으로 높인다. 현재 디지털 레이더의 가장 큰 걸림돌은 비용과 시스템의 복잡성이며, 하드웨어 구성품의 공용화나 Software Defined Radio(SDR) 방식 등에 의해 빠른 시일 내에 해소될 것으로 보인다. 또한 기존의 레이더 성능이 하드웨어에 대부분 의존적이었던 것과는 달리, 디지털 레이더의 성능은 소프트웨어 의존성이 높으므로 자원 관리, 상황 인식 및 적응적 레이더 운용, 다양한 파형 및 빔형성 등 지능형 알고리즘의 개발이 지속될 것으로 생각된다.
[참 고 문 헌]
1. Al-Rashid, Yasser. "Active Phased Array Radar Systems." Lockheed Martin MS2, Raday Systems, 2009.
2. van Vliet, F. E. "Trends in wideband phased-array front-ends FE van Vliet TNO Defence, Security and Safety, PO Box 96864, 2509 JG, The Hague, The Netherlands." Radar Conference, 2007. EuRAD 2007. European. IEEE, 2007.
3. Eudeline, Philippe. "Survey of active electronically scanned antenna in Thales Radars." Phased Array Systems & Technology, 2013 IEEE International Symposium on. IEEE, 2013.
4. Barbaresco, F., et al. "Intelligent M3R radar time resources management: Advanced cognition, agility & autonomy capabilities." Radar Conference-Surveillance for a Safer World, 2009. RADAR. International. IEEE, 2009.
5. Intelligent Multi-mission Radar Resources Management. IEEE 2008 Radar conference
6. BLACKMAN, SS, and G. VAN KEUK. "On phased-array radar tracking and parameter control." IEEE Transactions on aerospace and electronic systems 29(1), 1993.
7. Miranda, Sergio, et al. "Knowledge-based resource management for multifunction radar: a look at scheduling and task prioritization." IEEE Signal Processing Magazine 23(1), 2006, pp. 66-76.